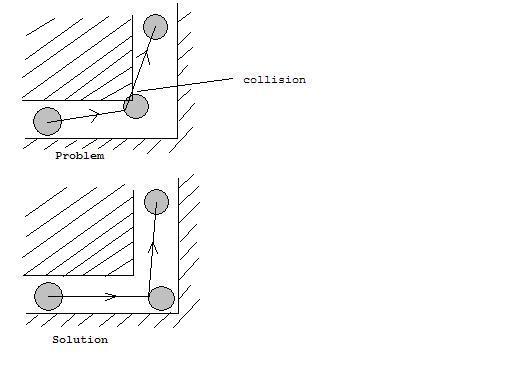
1. Bot's collisions with obstacles.
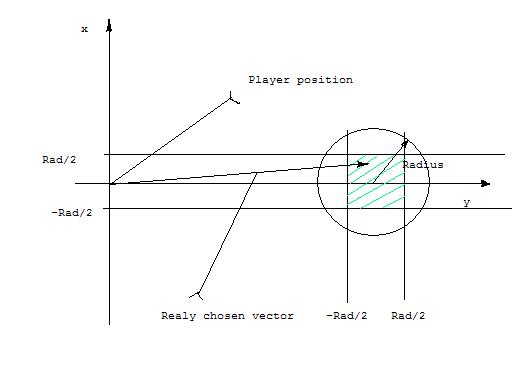
First of all lets talk about wayzone radius. I spectated thousands times how bots pass through waypoints with different wayzone radius from 0 to 128 and all that times they passed exactly through or close to the centre of wayzone and never through or close to the border of wayzone. This means that wayzones doesn't play their roles (this doesn't mean that they aren't working ). "Bots will pick a point inside this radius for their destination origin (based on things like orientation etc.), this just makes movement not that "static"." - this is written in POD-Bot manual. This means that their role isn't such important. The method of waypoint choosing (obtained from source code of POD-Bot released by Count Floyd) is shown on the scheme.
This means that even in unpractical case when wayzone radius is equal to maximum = 128 chosen point lies within radius = 64 (and average point lies within radius = 32!). Therefore bot's motion still remains almost "static". That's why i said that wayzones doesn't play their role.
"Some common newbie mistakes:
Picture 2 - not fitting Wayzones
Look at that biiig wayzone assigned to this waypoint. If a Bot tries to walk over this foot-bridge he will almost 100% fall down into death because he would think even the free space beside it is walkable. For precise movement a wayzone radius of 0 should be assigned instead." - as written in manual. Moreover that wayzones doesn't play their roles, they are the source of possible errors! So what we have?
1. Wayzones isn't such important.
2. They doesn't work well.
3. They are source of possible errors.
4. The fact of random choosing of point within wayzone makes difficult to predict bot motion after waypoint passing.
That's why I'm always setting wayzone radius to zero.
Every POD-Bot waypoint characterized by so called "desired distance" which equal 50 for normal waypoint, 25 for goal & 15 fot ladder.
// Initialize the radius for a special waypoint type, where the wpt
// is considered to be reached - this is the meaning of "desired distance" in words of Count Floyd.
This gives us explanation of bot's obstacle collisions and the solution of the problem (when wayzone radius = 0). Look at the scheme.